[Python图像处理] 十九.图像分割之基于K-Means聚类的区域分割
一.K-Means聚类原理
第一部分知识主要参考自己的新书《Python网络数据爬取及分析从入门到精通(分析篇)》和之前的博客 [Python数据挖掘课程] 二.Kmeans聚类数据分析。
K-Means聚类是最常用的聚类算法,最初起源于信号处理,其目标是将数据点划分为K个类簇,找到每个簇的中心并使其度量最小化。该算法的最大优点是简单、便于理解,运算速度较快,缺点是只能应用于连续型数据,并且要在聚类前指定聚集的类簇数。
下面是K-Means聚类算法的分析流程,步骤如下:
- 第一步,确定K值,即将数据集聚集成K个类簇或小组。
- 第二步,从数据集中随机选择K个数据点作为质心(Centroid)或数据中心。
- 第三步,分别计算每个点到每个质心之间的距离,并将每个点划分到离最近质心的小组,跟定了那个质心。
- 第四步,当每个质心都聚集了一些点后,重新定义算法选出新的质心。
- 第五步,比较新的质心和老的质心,如果新质心和老质心之间的距离小于某一个阈值,则表示重新计算的质心位置变化不大,收敛稳定,则认为聚类已经达到了期望的结果,算法终止。
- 第六步,如果新的质心和老的质心变化很大,即距离大于阈值,则继续迭代执行第三步到第五步,直到算法终止。
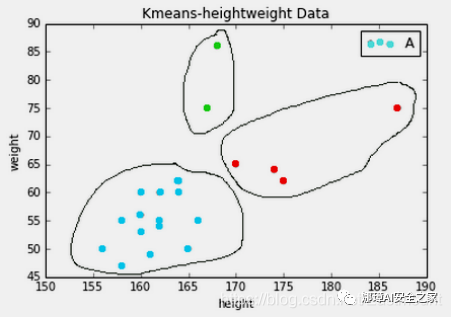
下图是对身高和体重进行聚类的算法,将数据集的人群聚集成三类。
二.K-Means聚类分割灰度图像
在图像处理中,通过K-Means聚类算法可以实现图像分割、图像聚类、图像识别等操作,本小节主要用来进行图像颜色分割。假设存在一张100×100像素的灰度图像,它由10000个RGB灰度级组成,我们通过K-Means可以将这些像素点聚类成K个簇,然后使用每个簇内的质心点来替换簇内所有的像素点,这样就能实现在不改变分辨率的情况下量化压缩图像颜色,实现图像颜色层级分割。
在OpenCV中,Kmeans()函数原型如下所示:
retval, bestLabels, centers = kmeans(data, K, bestLabels, criteria, attempts, flags[, centers])
- data表示聚类数据,最好是np.flloat32类型的N维点集
- K表示聚类类簇数
- bestLabels表示输出的整数数组,用于存储每个样本的聚类标签索引
- criteria表示算法终止条件,即最大迭代次数或所需精度。在某些迭代中,一旦每个簇中心的移动小于criteria.epsilon,算法就会停止
- attempts表示重复试验kmeans算法的次数,算法返回产生最佳紧凑性的标签
- flags表示初始中心的选择,两种方法是cv2.KMEANS_PP_CENTERS ;和cv2.KMEANS_RANDOM_CENTERS
- centers表示集群中心的输出矩阵,每个集群中心为一行数据
下面使用该方法对灰度图像颜色进行分割处理,需要注意,在进行K-Means聚类操作之前,需要将RGB像素点转换为一维的数组,再将各形式的颜色聚集在一起,形成最终的颜色分割。
# coding: utf-8import cv2import numpy as npimport matplotlib.pyplot as plt
#读取原始图像灰度颜色img = cv2.imread('scenery.png', 0) print img.shape
#获取图像高度、宽度rows, cols = img.shape[:]
#图像二维像素转换为一维data = img.reshape((rows * cols, 1))data = np.float32(data)
#定义中心 (type,max_iter,epsilon)criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#设置标签flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚类 聚集成4类compactness, labels, centers = cv2.kmeans(data, 4, None, criteria, 10, flags)
#生成最终图像dst = labels.reshape((img.shape[0], img.shape[1]))
#用来正常显示中文标签plt.rcParams['font.sans-serif']=['SimHei']
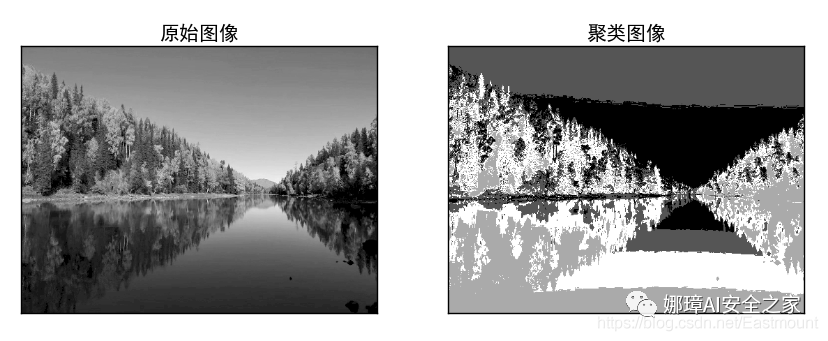
#显示图像titles = [u'原始图像', u'聚类图像'] images = [img, dst] for i in xrange(2): plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray'), plt.title(titles[i]) plt.xticks([]),plt.yticks([]) plt.show()
输出结果如图所示,左边为灰度图像,右边为K-Means聚类后的图像,它将灰度级聚集成四个层级,相似的颜色或区域聚集在一起。
三.K-Means聚类对比分割彩色图像
下面代码是对彩色图像进行颜色分割处理,它将彩色图像聚集成2类、4类和64类。
# coding: utf-8import cv2import numpy as npimport matplotlib.pyplot as plt
#读取原始图像img = cv2.imread('scenery.png') print img.shape
#图像二维像素转换为一维data = img.reshape((-1,3))data = np.float32(data)
#定义中心 (type,max_iter,epsilon)criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 10, 1.0)
#设置标签flags = cv2.KMEANS_RANDOM_CENTERS
#K-Means聚类 聚集成2类compactness, labels2, centers2 = cv2.kmeans(data, 2, None, criteria, 10, flags)
#K-Means聚类 聚集成4类compactness, labels4, centers4 = cv2.kmeans(data, 4, None, criteria, 10, flags)
#K-Means聚类 聚集成8类compactness, labels8, centers8 = cv2.kmeans(data, 8, None, criteria, 10, flags)
#K-Means聚类 聚集成16类compactness, labels16, centers16 = cv2.kmeans(data, 16, None, criteria, 10, flags)
#K-Means聚类 聚集成64类compactness, labels64, centers64 = cv2.kmeans(data, 64, None, criteria, 10, flags)
#图像转换回uint8二维类型centers2 = np.uint8(centers2)res = centers2[labels2.flatten()]dst2 = res.reshape((img.shape))
centers4 = np.uint8(centers4)res = centers4[labels4.flatten()]dst4 = res.reshape((img.shape))
centers8 = np.uint8(centers8)res = centers8[labels8.flatten()]dst8 = res.reshape((img.shape))
centers16 = np.uint8(centers16)res = centers16[labels16.flatten()]dst16 = res.reshape((img.shape))
centers64 = np.uint8(centers64)res = centers64[labels64.flatten()]dst64 = res.reshape((img.shape))
#图像转换为RGB显示img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)dst2 = cv2.cvtColor(dst2, cv2.COLOR_BGR2RGB)dst4 = cv2.cvtColor(dst4, cv2.COLOR_BGR2RGB)dst8 = cv2.cvtColor(dst8, cv2.COLOR_BGR2RGB)dst16 = cv2.cvtColor(dst16, cv2.COLOR_BGR2RGB)dst64 = cv2.cvtColor(dst64, cv2.COLOR_BGR2RGB)
#用来正常显示中文标签plt.rcParams['font.sans-serif']=['SimHei']
#显示图像titles = [u'原始图像', u'聚类图像 K=2', u'聚类图像 K=4', u'聚类图像 K=8', u'聚类图像 K=16', u'聚类图像 K=64'] images = [img, dst2, dst4, dst8, dst16, dst64] for i in xrange(6): plt.subplot(2,3,i+1), plt.imshow(images[i], 'gray'), plt.title(titles[i]) plt.xticks([]),plt.yticks([]) plt.show()
输出结果如下图所示,当K=2颜色聚集成两种,当K=64颜色聚集成64种。

希望这篇基础性文章对您有所帮助,如果有错误 或不足之处,请海涵!一起加油,2019年四月考博加油,写于贵阳钟书阁。